Exercise 2:
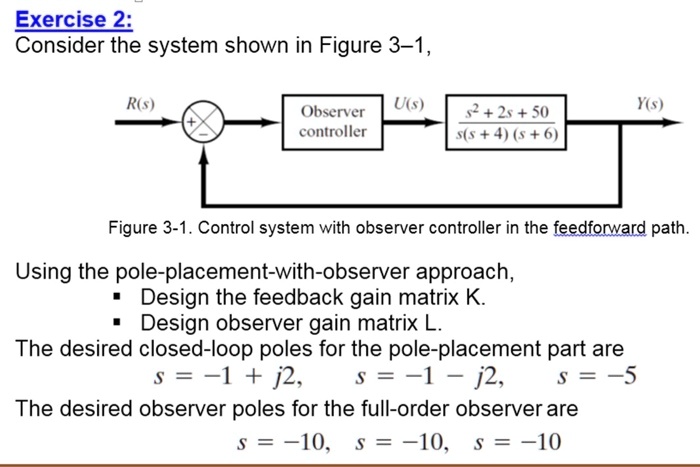
Consider the system shown in Figure 3-1,
$R(s)$ \\
+\\
Observer\\
controller\\
$U(s)$ \\
$\frac{s^2 + 2s + 50}{s(s + 4)(s + 6)}$\\
$Y(s)$\\
Figure 3-1. Control system with observer controller in the feedforward path.
Using the pole-placement-with-observer approach,
\\
\\
Design the feedback gain matrix K.
Design observer gain matrix L.
The desired closed-loop poles for the pole-placement part are
$s = -1 + j2$,
$s = -1 - j2$,
$s = -5$
The desired observer poles for the full-order observer are
$s = -10$, $s = -10$, $s = -10$