Exercise (Homework) 1. The robot manipulating a work piece (motion involving the intermediate frames)
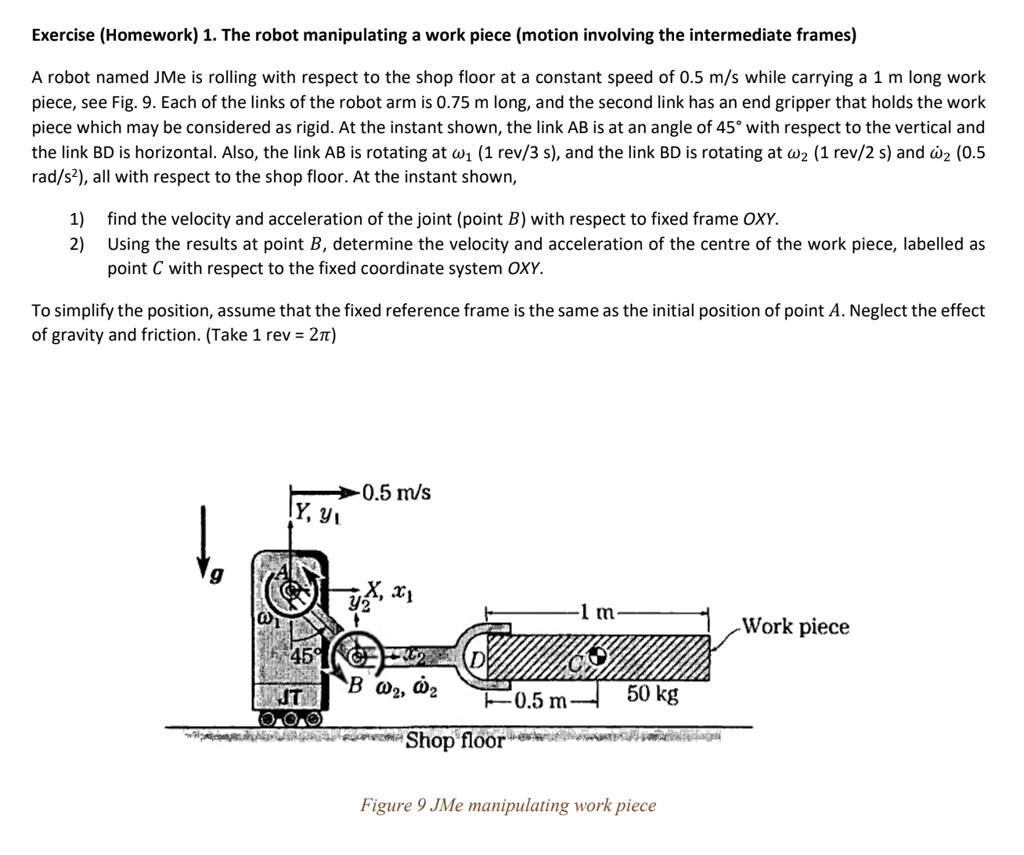
A robot named JMe is rolling with respect to the shop floor at a constant speed of 0.5 m/s while carrying a 1 m long work
piece, see Fig. 9. Each of the links of the robot arm is 0.75 m long, and the second link has an end gripper that holds the work
piece which may be considered as rigid. At the instant shown, the link AB is at an angle of 45° with respect to the vertical and
the link BD is horizontal. Also, the link AB is rotating at w₁ (1 rev/3 s), and the link BD is rotating at w₂ (1 rev/2 s) and ὡ2 (0.5
rad/s²), all with respect to the shop floor. At the instant shown,
1) find the velocity and acceleration of the joint (point B) with respect to fixed frame OXY.
2)
Using the results at point B, determine the velocity and acceleration of the centre of the work piece, labelled as
point C with respect to the fixed coordinate system OXY.
To simplify the position, assume that the fixed reference frame is the same as the initial position of point A. Neglect the effect
of gravity and friction. (Take 1 rev = 2π)
↓
g
0.5 m/s
Y, Y
Χ, X1
Уг
m
45°
Β ω, ώτ
JT
-Work piece
-0.5m-
50 kg
000
Shop floor
Figure 9 JMe manipulating work piece