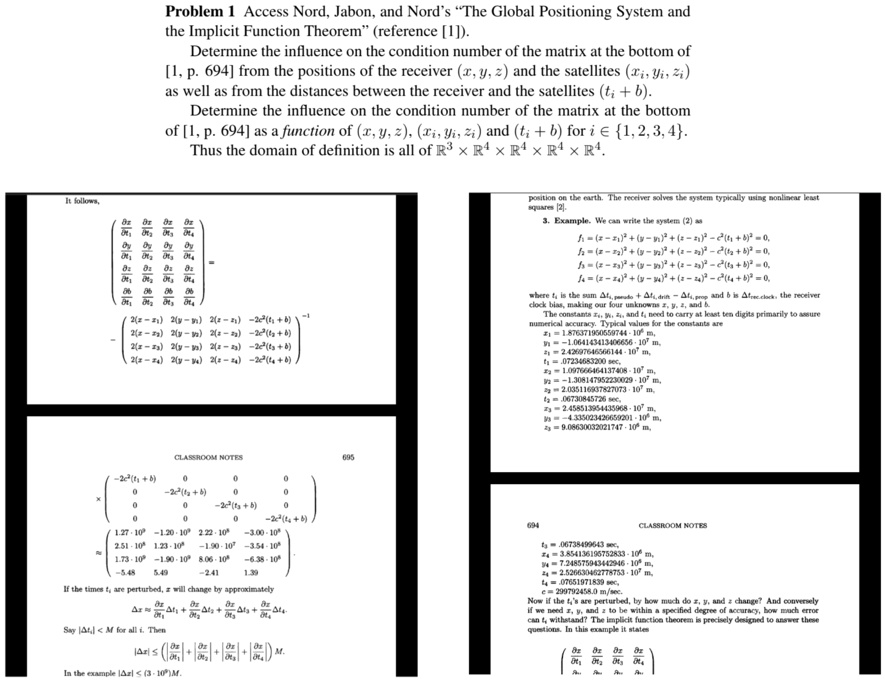
It follows,
([(delx)/(delt_(1)),(delx)/(delt_(2)),(delx)/(delt_(3)),(delx)/(delt_(4))
(dely)/(delt_(1)),(dely)/(delt_(2)),(dely)/(delt_(3)),(dely)/(delt_(4))
(delz)/(delt_(1)),(delz)/(delt_(2)),(delz)/(delt_(3)),(delz)/(delt_(4))
(delb)/(delt_(1)),(delb)/(delt_(2)),(delb)/(delt_(3)),(delb)/(delt_(4))])=
-([2(x-x_(1)),2(y-y_(1)),2(z-z_(1)),-2c^(2)(t_(1)+b)
2(x-x_(2)),2(y-y_(2)),2(z-z_(2)),-2c^(2)(t_(2)+b)
2(x-x_(3)),2(y-y_(3)),2(z-z_(3)),-2c^(2)(t_(3)+b)
2(x-x_(4)),2(y-y_(4)),2(z-z_(4)),-2c^(2)(t_(4)+b)])^(-1)
position on the earth. The receiver solves the system typically using nonlinear least
squares 2.
Example. We can write the system (2) as
f_(1)=(x-x_(1))^(2)+(y-y_(1))^(2)+(z-z_(1))^(2)-c^(2)(t_(1)+b)^(2)=0,
f_(2)=(x-x_(2))^(2)+(y-y_(2))^(2)+(z-z_(2))^(2)-c^(2)(t_(2)+b)^(2)=0,
f_(3)=(x-x_(3))^(2)+(y-y_(3))^(2)+(z-z_(3))^(2)-c^(2)(t_(3)+b)^(2)=0,
f_(4)=(x-x_(4))^(2)+(y-y_(4))^(2)+(z-z_(4))^(2)-c^(2)(t_(4)+b)^(2)=0,
where t_(i) is the sum Delta t_(i, pseudo )+Delta t_(i, drift )-Delta t_(i, prop ) and b is Delta t_(rec.clock ), the receiver
clock bias, making our four unknowns x,y,z, and b.
The constants x_(i),y_(i),z_(i), and t_(i) need to carry at least ten digits primarily to assure
numerical accuracy. Typical values for the constants are
x_(1)=1.876371950559744*10^(6)m,
y_(1)=-1.064143413406656*10^(7)m,
z_(1)=2.42697646566144*10^(7)m,
t_(1)=.07234683200sec,
x_(2)=1.097666464137408*10^(7)m,
y_(2)=-1.308147952230029*10^(7)m
z_(2)=2.035116937827073*10^(7)m,
t_(2)=.06730845726sec
x_(3)=2.458513954435968*10^(7)m
y_(3)=-4.335023426659201*10^(6)m,
z_(3)=9.08630032021747*10^(6)m,
t_(3)=.06738499643sec
x_(4)=3.854136195752833*10^(6)m
y_(4)=7.248575943442946*10^(6)m
z_(4)=2.526630462778753*10^(7)m
t_(4)=.07651971839sec
c=299792458.0(m)/(sec.)
Now if the t_(i) 's are perturbed, by how much do x,y, and z change? And conversely
if we need x,y, and z to be within a specified degree of accuracy, how much error
can t_(i) withstand? The implicit function theorem is precisely designed to answer these
questions. In this example it states
Problem 1 Access Nord, Jabon, and Nord's The Global Positioning System and the Implicit Function Theorem(reference [1] Determine the influence on the condition number of the matrix at the bottom of [1, p. 694] from the positions of the receiver (,y, ) and the satellites (,Yi,z;) as well as from the distances between the receiver and the satellites (t; + b) Determine the influence on the condition number of the matrix at the bottom of [1,p.694] as a function of x,y,z,xi,yi,zi) and ti+bfor i {1,2,3,4} Thus the domain of definition is all of R3 R4 R4 R4 R4
It follows,
position on the carth. The receiver solves the system typically using nonlincar least squares [2]. 3. Example. We can write the system (2) as = (zz)a + (y y1)a + ( )a c2(t+ b)a =0, = (z z)3 + (y y)a + (z s)2 c( + b)a = 0, s = (z zs)a + (y ys)a + ( )a c2(ts + b)2 = 0, = (z =z)a + (y y)a + ( = )a c2(f + b)a = 0, where t, is the som fs,gerodo + ta,drin fs,prog p and b is frec.clock, the receiver clock bias, making our four unknowns z, y, 2, and b. The constants , w, i, and ; ncod to carry at loast ten digits primarily to assure numerical accuracy. Typical values for the constants are =1.876371950559744 -10m $s = 1.064143413406656 107 m, ; = 2.42697646566144 - 10 m, ts = .07234683200 sec =1.097666464137408 -10m 92 = 1.308147952230029 - 107 m, g = 2.035116937827073 - 107 m, ts m .06730845726 sec, 2=2.45851395443568-10 m vs = 4.335023426659201 - 10 m, zs = 9.08630032021747 - 106 m,
ar
2(z = ) 2y=y 2(z2c2(t+b 2(z za) 2(y m) (tz r) 2c3(ta+ b) 2(z = zs) 2(ggs) 2(a =2g) 2c2(ts + b) 2z)2y)2(=z2c(t+b
-2c2(t; +b) 0 0 2c3(fg + b) 0 0 2c2(fg + b) 0 0 0 2c2(t4 + b) 1.27 - 10b 1.20 - 109 2.22 - 108 3.00 - 108 2.51 - 10 1.23 - 108 1.90 - 10 3.54 - 10a 1.73 - 10a 1.90 - 109 8.06 - 108 6.38 - 108 5.48 5.49 2.41 1.39 If the times t; are perturbed, z will change by approximately
694
tg =.06738499643 sec =3.85413619575283310 m =7.248575943442946-10m zs = 2.526630462778753 - 103 m, =.07651971839 e = 299792458.0 m/sec. Now if the ts are perturbed, by how much do z, y, and z change? And conversely if we need z, y, and to be within a specified degree of accaracy, how much error can t, withstand? The implicit function theorem is precisely designed to answer these questions. In this example it states
Ar ot
oz t - ot
oz M ot
Say [,] < M for all i. Ther +++m In the e le |z| (3 - 10)M.
0 Ots