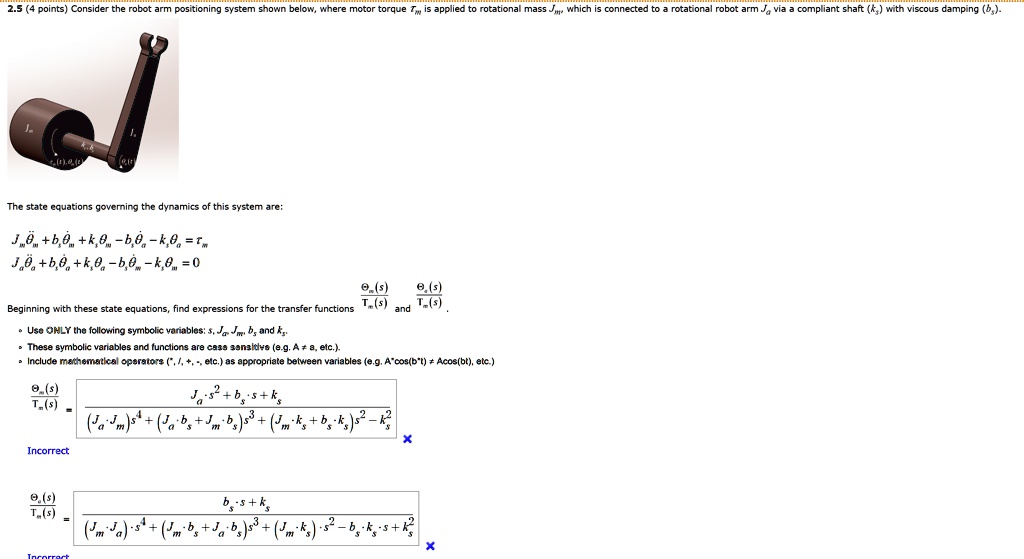
2.5 (4 points) Consider the robot arm positioning system shown below, where motor torque $T_m$ is applied to rotational mass $J_m$, which is connected to a rotational robot arm $J_a$ via a compliant shaft ($k_s$) with viscous damping ($b_s$).
The state equations governing the dynamics of this system are:
$J_m\ddot{\theta} + b_s\dot{\theta} + k_s\theta - b_s\dot{\theta}_a - k_s\theta_a = T_m$
$J_a\ddot{\theta}_a + b_s\dot{\theta}_a + k_s\theta_a - b_s\dot{\theta} - k_s\theta = 0$
Beginning with these state equations, find expressions for the transfer functions $\frac{\theta_m(s)}{T_m(s)}$ and $\frac{\theta_a(s)}{T_m(s)}$.
• Use ONLY the following symbolic variables: $s$, $J_m$, $J_a$, $b_s$, and $k_s$.
• These symbolic variables and functions are case sensitive (e.g., A ≠ a, etc.).
• Include mathematical operators (*, /, +, −, etc.) as appropriate between variables (e.g., A*cos(b*t) ≠ Acos(bt), etc.)
$\frac{\theta_m(s)}{T_m(s)} = \frac{J_as^2 + b_ss + k_s}{(J_mJ_a)s^4 + (J_ab_s + J_mb_s)s^3 + (J_mk_s + J_ab_s)s^2 - b_sk_ss - k_s^2}$
Incorrect
$\frac{\theta_a(s)}{T_m(s)} = \frac{b_ss + k_s}{(J_mJ_a)s^4 + (J_mb_s + J_ab_s)s^3 + (J_mk_s)s^2 - b_sk_ss + k_s^2}$
Incorrect