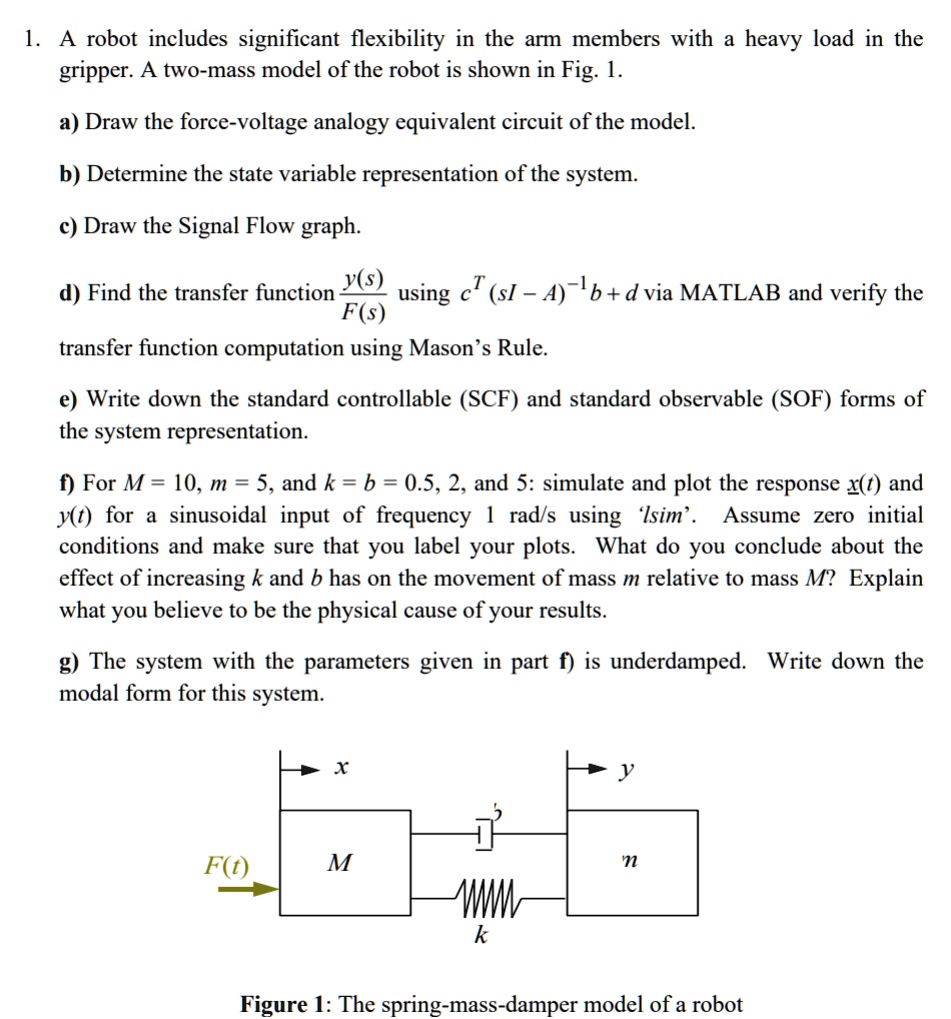
1. A robot includes significant flexibility in the arm members with a heavy load in the gripper. A two-mass model of the robot is shown in Fig. 1.
a) Draw the force-voltage analogy equivalent circuit of the model.
b) Determine the state variable representation of the system.
c) Draw the Signal Flow graph.
d) Find the transfer function $\frac{y(s)}{F(s)}$ using $c^T(sI - A)^{-1}b + d$ via MATLAB and verify the transfer function computation using Mason's Rule.
e) Write down the standard controllable (SCF) and standard observable (SOF) forms of the system representation.
f) For $M = 10$, $m = 5$, and $k = b = 0.5, 2, and 5$: simulate and plot the response $x(t)$ and $y(t)$ for a sinusoidal input of frequency 1 rad/s using 'lsim'. Assume zero initial conditions and make sure that you label your plots. What do you conclude about the effect of increasing $k$ and $b$ has on the movement of mass $m$ relative to mass $M$? Explain what you believe to be the physical cause of your results.
g) The system with the parameters given in part f) is underdamped. Write down the modal form for this system.