-10 Tooth Metal Gear
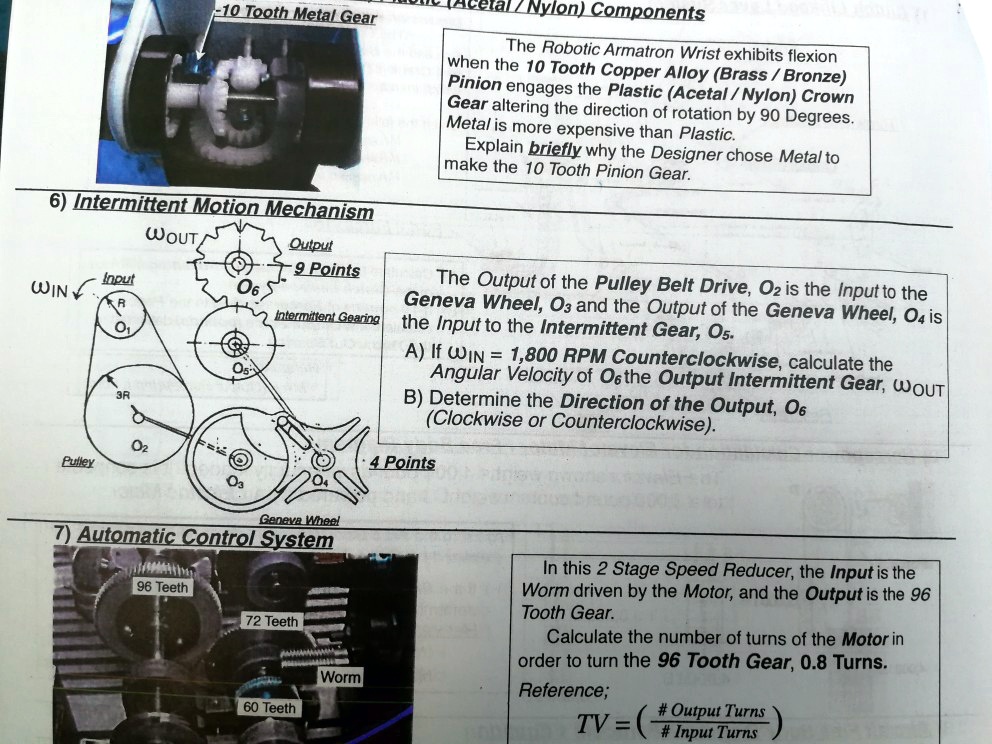
6) Intermittent Motion Mechanism
WOUT
Input
WIN
Output
-9 Points
Acetal/Nylon) Components
The Robotic Armatron Wrist exhibits flexion
when the 10 Tooth Copper Alloy (Brass / Bronze)
Pinion engages the Plastic (Acetal/Nylon) Crown
Gear altering the direction of rotation by 90 Degrees.
Metal is more expensive than Plastic.
Explain briefly why the Designer chose Metal to
make the 10 Tooth Pinion Gear.
3R
Intermittent Gearing
02
Pulley
03
Geneva Wheel
7) Automatic Control System
96 Teeth
72 Teeth
Worm
60 Teeth
The Output of the Pulley Belt Drive, O2 is the Input to the
Geneva Wheel, O3 and the Output of the Geneva Wheel, O4 is
the Input to the Intermittent Gear, 05.
A) If WIN = 1,800 RPM Counterclockwise, calculate the
Angular Velocity of Os the Output Intermittent Gear, WOUT
B) Determine the Direction of the Output, O6
(Clockwise or Counterclockwise).
4 Points
In this 2 Stage Speed Reducer, the Input is the
Worm driven by the Motor, and the Output is the 96
Tooth Gear.
Calculate the number of turns of the Motor in
order to turn the 96 Tooth Gear, 0.8 Turns.
Reference;
TV = \frac{\# Output Turns}{\# Input Turns}