10.1 Steps 1, 2, 3 (TnomODE, block diagram for torque control of angular velocity Motor torque T. Angular acceleration Angular velocity Load Shown to the right is the motor of Homework 5.16. Om The ODE for the motor's angular velocity is Motor (stator) M=I Izz+bw=Tm=TLood
The point of this problem is to choose a motor torque Tm so w ~ wnom (nom is the desired/nominal value of w) even when an unknown load (disturbance) TLoad is applied to the motor. This control system design is separated into four steps (as shown in Chapter 17). 1. Determine Tmnom, the value of Tm that keeps w at nom when TLoad =0. 2. Rewrite the ODE for in terms of, which simplifies choosing a control law for Tm 3. Draw a block diagram that visually depicts this system's mathematics with its control. 4. Choose a control law for Tm (done in Hw 10.2 and Hw 10.3) to minimize the error due to TLovd. 1. Using the fact that wnom is chosen to be a known constant, find Tmnom- Note: One way to find Tmnom is to set Tm = Tmnom = nom, and = nom in the governing ODE. Although Wnom is constant, only minor modifications are needed to treat nom as a specified function of time. Result: Tmnom = 2. To design a control system, Tm is separated into two terms and the ODE is rewritten in terms of where is the error between the actual value of and the desired value of. Express the ODE for in terms of Izz, b, Tm and TLoad Tm=Tmnom+Tm Result: a+a= -nom
One way to rewrite the differential equation in terms of, and T. is to substitute = + som. = + nom, and Tm = Tm + Tmnom into the governing equation of motion and then simplify.
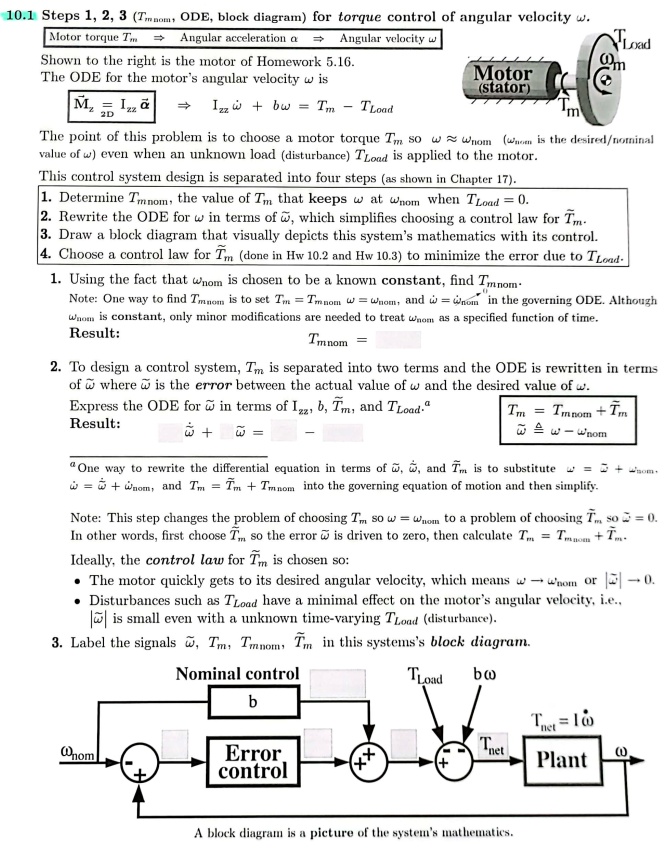
Note: This step changes the problem of choosing T., so = nom to a problem of choosing T., so = 0. In other words, first choose T,. so the error is driven to zero, then calculate T... = Tnom + T..- Ideally, the control law for Tm is chosen so: The motor quickly gets to its desired angular velocity, which means - nom or [|~| 0. Disturbances such as TLoad have a minimal effect on the motor's angular velocity, i.e. [] is small even with an unknown time-varying TLoad (disturbance). 3. Label the signals, Tm, Tmnom, Tm in this system's block diagram.
Nominal control
TLoad b
b
Onom
Error control
net
Plant
A block diagram is a picture of the system's mathematics.