Tdqo = [ sin((P/2)*thetas), sin((P/2)*thetas - (2*pi/3)), sin((P/2)*thetas + (2*pi/3));
cos((P/2)*thetas), cos((P/2)*thetas - (2*pi/3)), cos((P/2)*thetas + (2*pi/3));
1/2, 1/2, 1/2 ]
T-1dqo = [ sin((P/2)*thetas), cos((P/2)*thetas), 1;
sin((P/2)*thetas - (2*pi/3)), cos((P/2)*thetas - (2*pi/3)), 1;
sin((P/2)*thetas + (2*pi/3)), cos((P/2)*thetas + (2*pi/3)), 1; ]
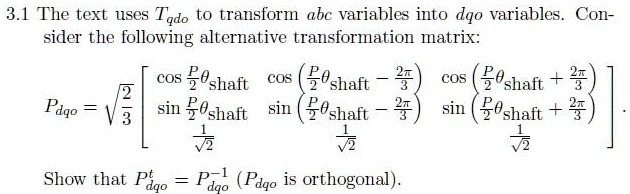
3.1 The text uses Tado to transform abc variables into dqo variables. Consider the following alternative transformation matrix:
cos(0shaft) cos(0shaft - 2cos(0shaft) + 2 sin(shaft) sin(oshaft) - 2 sin(oshaft) + 1 V2