The Single Inverted Pendulum (SIP) experiment is a "classroom example". It can be seen as balancing a
broomstick on the tip of one's finger. The difference being that the broomstick is in a three-dimensional
space while the pendulum is in a linear plane. In this short project, the inverted pendulum is mounted on a
linear cart. The challenge is to keep a single inverted pendulum balanced and track the linear cart to a
commanded position. In practice, it is interesting to point out that similar dynamics and control problem
apply to rudder roll stabilization of ships.
At the end of the session, you should know the following:
\begin{itemize}
\item How to mathematically model the Single Inverted Pendulum mounted on the linear servo plant,
using, for example, Lagrangian mechanics or force analysis on free body diagrams.
\item How to linearize the obtained non-linear equations of motion about the quiescent point of
operation.
\item How to obtain a linear model of a dynamic system.
\item How to investigate the response of the inverted -pendulum-linear-cart system, in response to a tap
to the pendulum.
\end{itemize}
Students are therefore expected to be familiar in using MATLAB/Simulink to simulate the plant in real-
time and in designing their controller.
Mission: Determine the system's Stability 1) theoretically and 2) numerically.
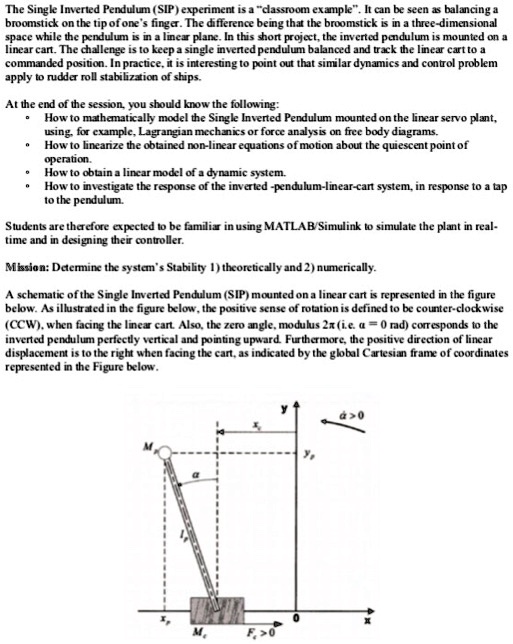
A schematic of the Single Inverted Pendulum (SIP) mounted on a linear cart is represented in the figure
below. As illustrated in the figure below, the positive sense of rotation is defined to be counter-clockwise
(CCW), when facing the linear cart. Also, the zero angle, modulus $2\pi$ (i.e. $\alpha = 0$ rad) corresponds to the
inverted pendulum perfectly vertical and pointing upward. Furthermore, the positive direction of linear
displacement is to the right when facing the cart, as indicated by the global Cartesian frame of coordinates
represented in the Figure below.