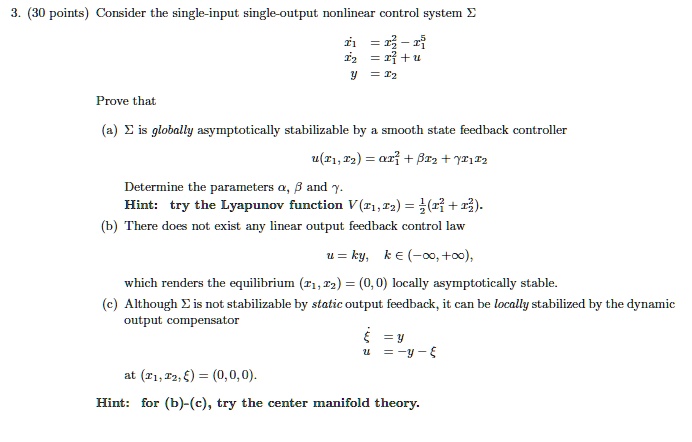
3. (30 points) Consider the single-input single-output nonlinear control system ?
$\dot{x}_1 = x_2^2 - x_1^5$
$\dot{x}_2 = x_1^2 + u$
y = x_2
Prove that
(a) ? is globally asymptotically stabilizable by a smooth state feedback controller
u(x_1, x_2) = \alpha x_1^2 + \beta x_2 + \gamma x_1 x_2
Determine the parameters ?, ? and ?.
Hint: try the Lyapunov function $V(x_1, x_2) = \frac{1}{2}(x_1^2 + x_2^2)$.
(b) There does not exist any linear output feedback control law
u = ky, k ? (-?, +?),
which renders the equilibrium $(x_1, x_2) = (0, 0)$ locally asymptotically stable.
(c) Although ? is not stabilizable by static output feedback, it can be locally stabilized by the dynamic
output compensator
$\dot{\xi} = y$
u = -y - ?
at $(x_1, x_2, \xi) = (0, 0, 0)$.
Hint: for (b)-(c), try the center manifold theory.