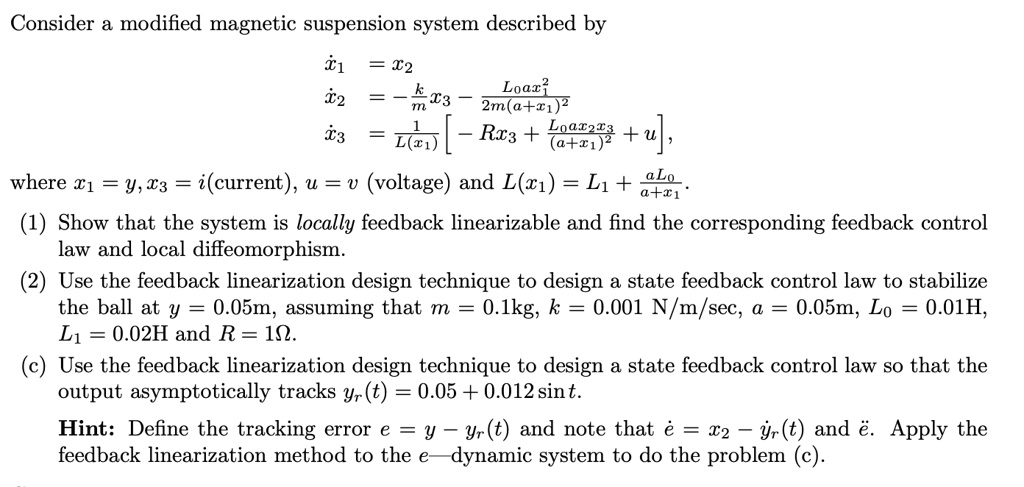
Consider a modified magnetic suspension system described by
\begin{align*}
\dot{x}_1 &= x_2 \\
\dot{x}_2 &= -\frac{k}{m}x_3 - \frac{L_0ax_1^2}{2m(a+x_1)^2} \\
\dot{x}_3 &= \frac{1}{L(x_1)}\left[-Rx_3 + \frac{L_0ax_2x_3}{(a+x_1)^2} + u\right],
\end{align*}
where $x_1 = y$, $x_3 = i$(current), $u = v$ (voltage) and $L(x_1) = L_1 + \frac{aL_0}{a+x_1}$.
(1) Show that the system is locally feedback linearizable and find the corresponding feedback control
law and local diffeomorphism.
(2) Use the feedback linearization design technique to design a state feedback control law to stabilize
the ball at $y = 0.05m$, assuming that $m = 0.1kg$, $k = 0.001$ N/m/sec, $a = 0.05m$, $L_0 = 0.01H$,
$L_1 = 0.02H$ and $R = 1\Omega$.
(c) Use the feedback linearization design technique to design a state feedback control law so that the
output asymptotically tracks $y_r(t) = 0.05 + 0.012\sin t$.
Hint: Define the tracking error $e = y - y_r(t)$ and note that $\dot{e} = x_2 - \dot{y}_r(t)$ and $\ddot{e}$. Apply the
feedback linearization method to the $e$-dynamic system to do the problem (c).