Q2. This question is composed of two independent parts.
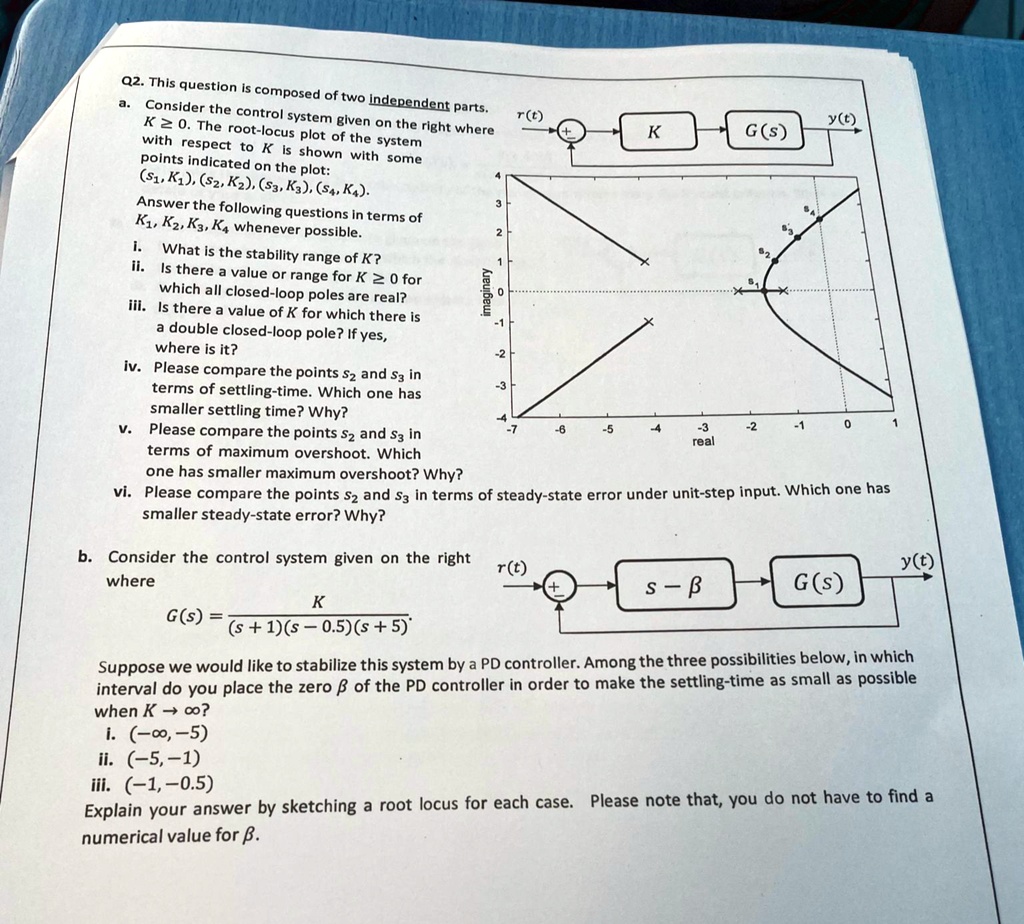
a. Consider the control system given on the right where
K≥ 0. The root-locus plot of the system
with respect to K is shown with some
points indicated on the plot:
(S1, K1), (S2, K2), (S3, K3), (S4, K4).
r(t)
y(t)
K
G(s)
Answer the following questions in terms of
K1, K2, K3, K₄ whenever possible.
i. What is the stability range of K?
ii. Is there a value or range for K≥ 0 for
which all closed-loop poles are real?
iii. Is there a value of K for which there is
a double closed-loop pole? If yes,
where is it?
iv. Please compare the points S2 and S3 in
terms of settling-time. Which one has
smaller settling time? Why?
v.
Please compare the points S₂ and S3 in
terms of maximum overshoot. Which
one has smaller maximum overshoot? Why?
imaginary
3
2
1
0
T
-2
-3
4
-7
-6
-5
-4
-3
real
-2
-1
0
1
vi. Please compare the points S2 and S3 in terms of steady-state error under unit-step input. Which one has
smaller steady-state error? Why?
b. Consider the control system given on the right
where
K
G(s) = (s + 1)(s-0.5)(s + 5)
r(t)
+
s-G(s)
y(t)
Suppose we would like to stabilize this system by a PD controller. Among the three possibilities below, in which
interval do you place the zero ẞ of the PD controller in order to make the settling-time as small as possible
when K→∞?
i. (-∞,-5)
ii. (-5,-1)
iii. (-1,-0.5)
Explain your answer by sketching a root locus for each case. Please note that, you do not have to find a
numerical value for β.