Angular momentum in 3D dynamics
A boomerang is a specially designed spinning aerodynamic object that undergoes complex 3D dynamic motion to achieve a curved trajectory. Aboriginal boomerangs date back over 10 thousand years. The system may be modeled as a thin spinning object of mass m and radius r.
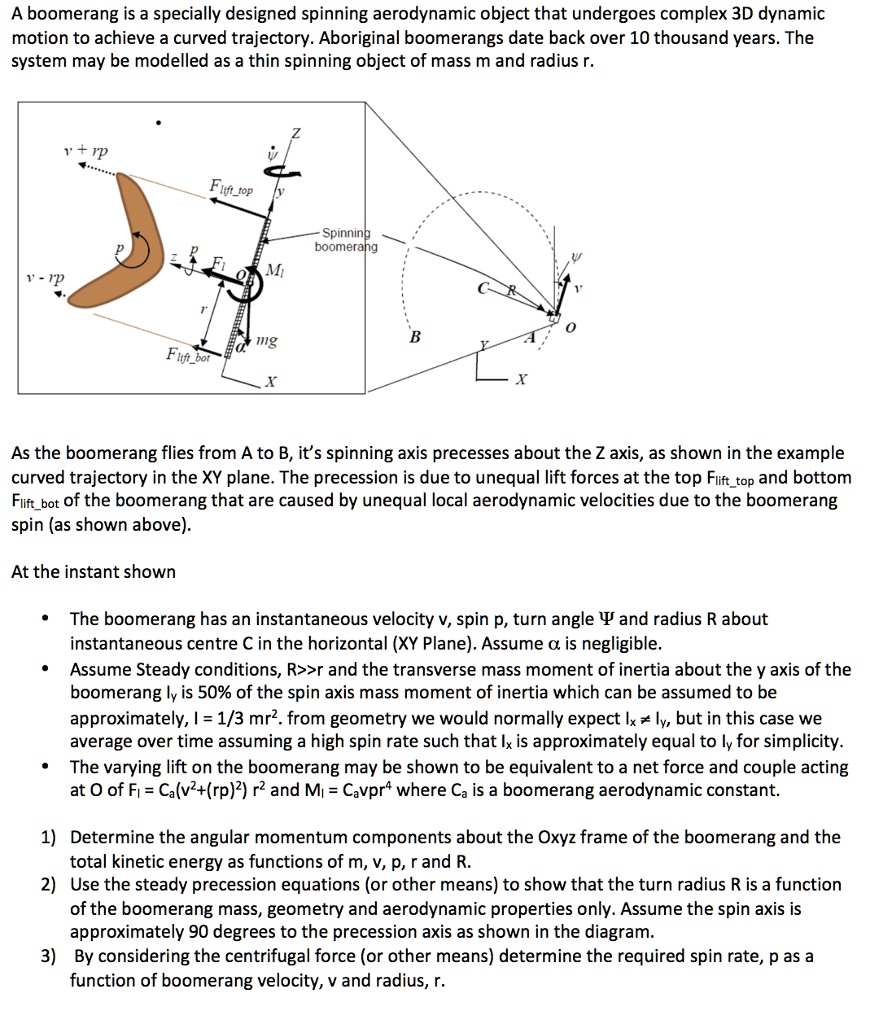
As the boomerang flies from A to B, its spinning axis precesses about the Z axis, as shown in the example curved trajectory in the XY plane. The precession is due to unequal lift forces at the top Flift_top and bottom Fift_bot of the boomerang that are caused by unequal local aerodynamic velocities due to the boomerang spin (as shown above).
At the instant shown, the boomerang has an instantaneous velocity v, spin p, turn angle W, and radius R about instantaneous center C in the horizontal (XY Plane). Assume a is negligible. Assume steady conditions, R >> r, and the transverse mass moment of inertia about the y axis of the boomerang ly is 50% of the spin axis mass moment of inertia which can be assumed to be approximately, I = 1/3 mr^2. From geometry, we would normally expect Ixly, but in this case, we average over time assuming a high spin rate such that Ix is approximately equal to ly for simplicity. The varying lift on the boomerang may be shown to be equivalent to a net force and couple acting at O of F = Cav^2 + (rp)r^2 and M = Cavpr where Ca is a boomerang aerodynamic constant.
1) Determine the angular momentum components about the Oxyz frame of the boomerang and the total kinetic energy as functions of m, v, p, r, and R.
2) Use the steady precession equations (or other means) to show that the turn radius R is a function of the boomerang mass, geometry, and aerodynamic properties only. Assume the spin axis is approximately 90 degrees to the precession axis as shown in the diagram.
3) By considering the centrifugal force (or other means), determine the required spin rate, p, as a function of boomerang velocity, v, and radius, r.