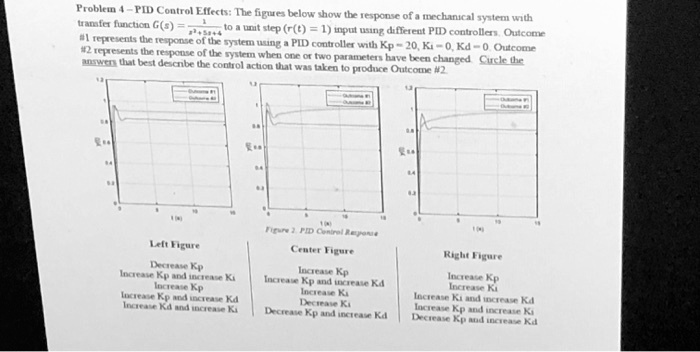
Problem 4 -- PID Control Effects: The figures below show the response of a mechanical system with transfer function $G(s) = \frac{1}{s^2 + 5s + 4}$ to a unit step ($r(t) = 1$) input using different PID controllers. Outcome #1 represents the response of the system using a PID controller with $K_p = 20$, $K_i = 0$, $K_d = 0$. Outcome #2 represents the response of the system when one or two parameters have been changed. Circle the answers that best describe the control action that was taken to produce Outcome #2
Left Figure
Decrease $K_p$
Increase $K_p$ and increase $K_i$
Increase $K_p$
Increase $K_p$ and increase $K_d$
Increase $K_d$ and increase $K_i$
Center Figure
Increase $K_p$
Increase $K_p$ and increase $K_d$
Increase $K_d$
Decrease $K_i$
Decrease $K_p$ and increase $K_d$
Right Figure
Increase $K_p$
Increase $K_i$
Increase $K_i$ and increase $K_d$
Increase $K_p$ and increase $K_i$
Decrease $K_p$ and increase $K_d$