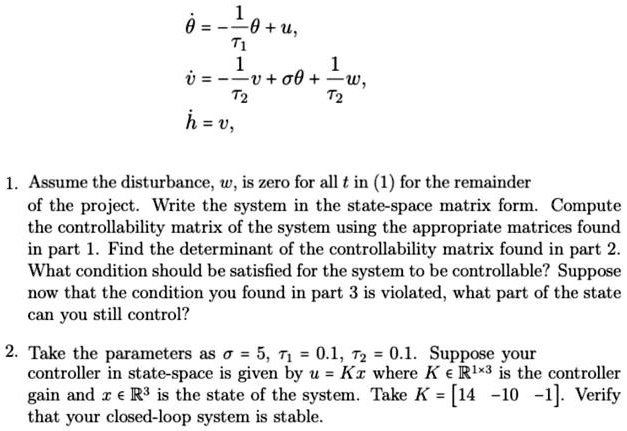
\dot{\theta} = -\frac{1}{\tau_1}\theta + u,
\dot{v} = -\frac{1}{\tau_2}v + \sigma\theta + \frac{1}{\tau_2}w,
h = v,
1. Assume the disturbance, w, is zero for all t in (1) for the remainder
of the project. Write the system in the state-space matrix form. Compute
the controllability matrix of the system using the appropriate matrices found
in part 1. Find the determinant of the controllability matrix found in part 2.
What condition should be satisfied for the system to be controllable? Suppose
now that the condition you found in part 3 is violated, what part of the state
can you still control?
2. Take the parameters as \sigma = 5, \tau_1 = 0.1, \tau_2 = 0.1. Suppose your
controller in state-space is given by u = Kx where K \in \mathbb{R}^{1x3} is the controller
gain and x \in \mathbb{R}^3 is the state of the system. Take K = [14 -10 -1]. Verify
that your closed-loop system is stable.