3. Animating Robot Control
This problem applies the theory of parametric lines in space to robot control, so we are working with the same
situation as in the last problem. To move a robot around, you need to specify a position for the robot (determined
by the configuration (a, b, c, d, e) of its motors) for each point in time. That is, you need to specify a parametric
curve $r(t) = (a(t), b(t), c(t), d(t), e(t))$.
One of the simplest ways to do this is linear interpolation that is, given the starting configuration $p$ and the ending
configuration $q$, we just write down the line $l(t)$ connecting $p$ to $q$.
X,Y,Z,A,B,C
P1
TCP
P2
PART
P
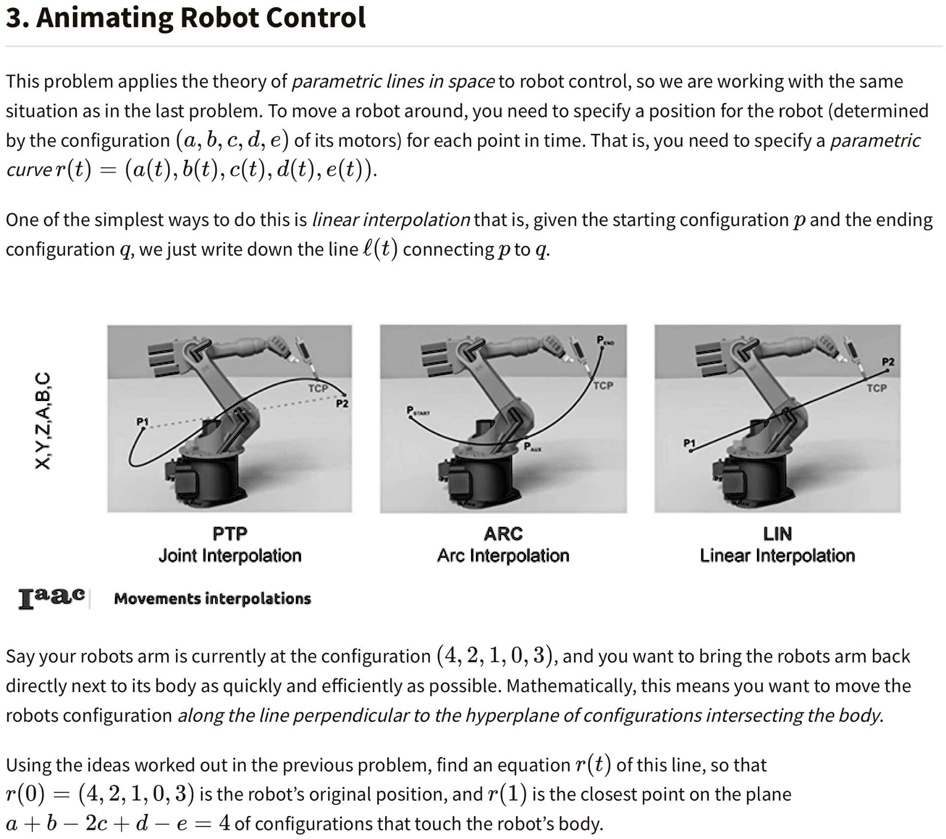
PTP
ARC
Joint Interpolation
Arc Interpolation
P
TCP
P1
LIN
Linear Interpolation
TCP
P2
Taac Movements interpolations
Say your robots arm is currently at the configuration (4, 2, 1, 0, 3), and you want to bring the robots arm back
directly next to its body as quickly and efficiently as possible. Mathematically, this means you want to move the
robots configuration along the line perpendicular to the hyperplane of configurations intersecting the body.
Using the ideas worked out in the previous problem, find an equation $r(t)$ of this line, so that
$r(0) = (4, 2, 1, 0, 3)$ is the robot's original position, and $r(1)$ is the closest point on the plane
$a+b-2c+d-e = 4$ of configurations that touch the robot's body.