An LTI (Linear Time-Invariant) system is defined as a system that satisfies the properties of linearity
and time-invariance with a block diagram shown in figure 1.
To be specific, let a(t) be the input signal, b(t) be the output signal, a LTI system L should satisfy:
Linearity: A system L is considered linear if it satisfies the equation:
L{alpha _(1)a_(1)(t)+alpha _(2)a_(2)(t)}=alpha _(1)L{a_(1)(t)}+alpha _(2)L{a_(2)(t)},
where alpha _(1) and alpha _(2) are constants, and alpha _(1)(t) and alpha _(2)(t) are input signals.
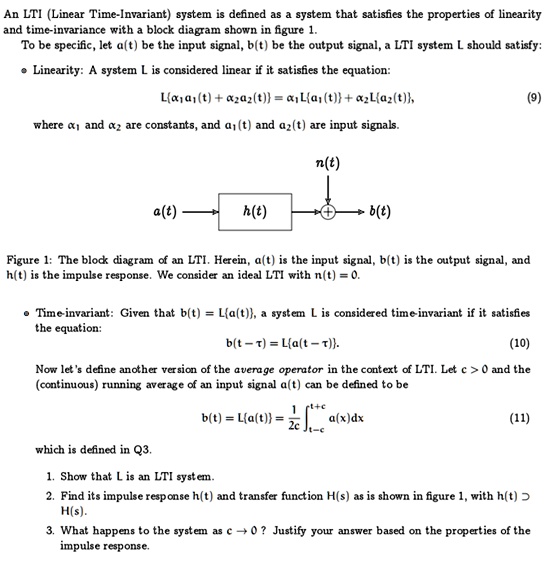
Figure 1: The block diagram of an LTI. Herein, a(t) is the input signal, b(t) is the output signal, and
h(t) is the impulse response. We consider an ideal LTI with n(t)=0.
Time-invariant: Given that b(t)=L{a(t)}, a system L is considered time-invariant if it satisfies
the equation:
b(t- au )=L{a(t- au )}.
Now let's define another ver sion of the average operator in the context of LTI. Let c>0 and the
(continuous) running average of an input signal a(t) can be defined to be
b(t)=L{a(t)}=(1)/(2c)int_(t-c)^(t+c) a(x)dx
which is defined in Q3.
Show that L is an LTI system.
Find its impulse response h(t) and transfer function H(s) as is shown in figure 1 , with h(t)sup
H(s).
What happens to the system as c->0 ? Justify your answer based on the properties of the
impulse response.
An LTI (Linear Time-Invariant) system is defined as a system that satisfies the properties of linearity and time-invariance with a block diagram shown in figure 1. To be specific, let a(t) be the input signal, b(t) be the output signal, a LTI system L should satisfy:
Linearity: A system L is considered linear if it satisfies the equation:
L{xat+xat}=aL{at}+xL{at}
(9)
where and are constants,and at and at) are input signals
n(t)
a(t)
h(t)
Figure 1: The block diagram of an LTI.Herein, a(t) is the input signal,bt is the output signal,and h(t) is the impulse response. We consider an ideal LTI with n(t) = 0.
o Time-invariant: Given that bt= L{at),a system L is considered time-invariant if it satisfies the equation b(t=T)=L{a(t=T)}. (10)
Now let's define another version of the average operator in the context of LTI. Let c > 0 and the (continuous) running average of an input signal a(t) can be defined to be
bt=L{at}=
axdx
(11)
which is defined in Q3.
1. Show that L is an LTI system
2. Find its impulse response h(t) and transfer function H(s) as is shown in figure 1, with h(t) H(s). 3. What happens to the system as c - 0? Justify your answer based on the properties of the impulse response.