Required information
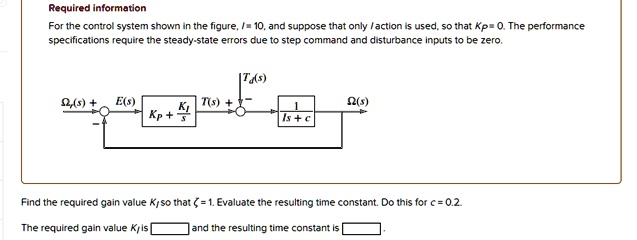
For the control system shown in the figure, $l = 10$, and suppose that only $I$ action is used, so that $K_p = 0$. The performance
specifications require the steady-state errors due to step command and disturbance inputs to be zero.
$T_d(s)$
$\Omega_d(s)$ + $E(s)$
$K_I$
$T(s)$ +
$K_p + \frac{K_I}{s}$
$\Omega(s)$
$\frac{1}{Is + c}$
Find the required gain value $K_I$ so that $\zeta = 1$. Evaluate the resulting time constant. Do this for $c = 0.2$.
The required gain value $K_I$ is ____ and the resulting time constant is ____