applied force) However, in real springs, loss of energy during the deformation and restoration process causes
damping and hysteresis (ie, behaviour that depends on the history of the spring's state)
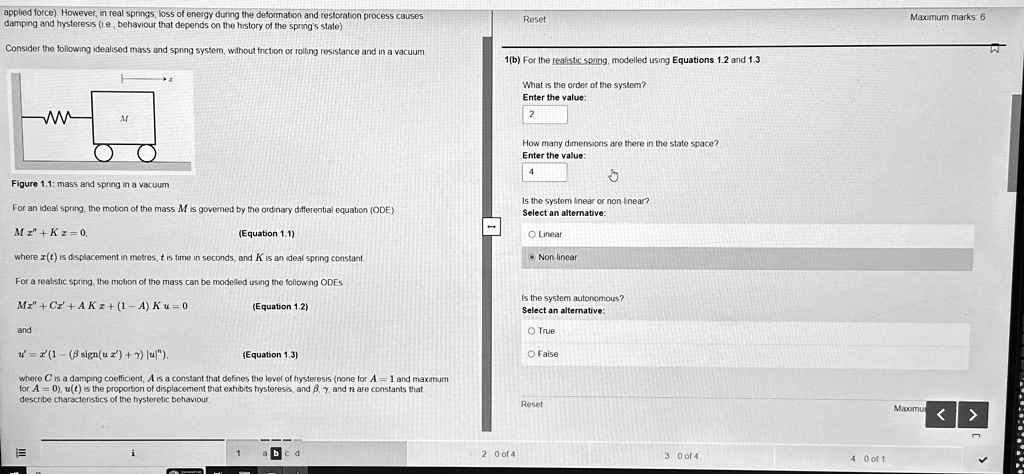
Consider the following idealised mass and spring system, without friction or rolling resistance and in a vacuum
Figure 1.1: mass and spring in a vacuum
For an ideal spring, the motion of the mass $M$ is governed by the ordinary differential equation (ODE)
$M \ddot{z} + Kz = 0$,
(Equation 1.1)
where $z(t)$ is displacement in metres, $t$ is time in seconds, and $K$ is an ideal spring constant
For a realistic spring, the motion of the mass can be modelled using the following ODEs
$M \ddot{z} + C \dot{z} + AKz + (1 - A)Ku = 0$
(Equation 1.2)
and
$\dot{u} = z'(1 - (\beta \text{sign}(uz) + \gamma)|u|^n)$
(Equation 1.3)
where $C$ is a damping coefficient, $A$ is a constant that defines the level of hysteresis (none for $A = 1$ and maximum
for $A = 0$), $u(t)$ is the proportion of displacement that exhibits hysteresis, and $\beta$, $\gamma$, and $n$ are constants that
describe characteristics of the hysteretic behaviour