Problem 5. (20 points)
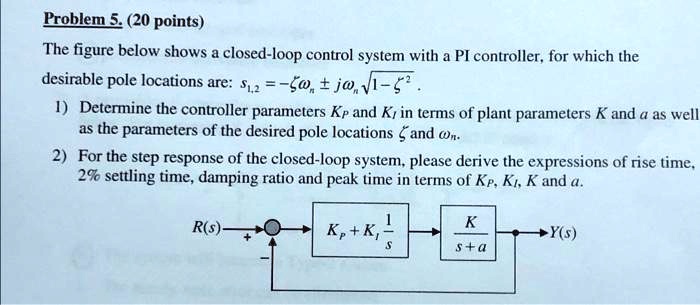
The figure below shows a closed-loop control system with a PI controller, for which the
desirable pole locations are: $s_{1,2} = -\zeta\omega_n \pm j\omega_n\sqrt{1-\zeta^2}$.
1) Determine the controller parameters $K_P$ and $K_I$ in terms of plant parameters $K$ and $a$ as well
as the parameters of the desired pole locations $\zeta$ and $\omega_n$.
2) For the step response of the closed-loop system, please derive the expressions of rise time,
2% settling time, damping ratio and peak time in terms of $K_P$, $K_I$, $K$ and $a$.
$R(s)$---
$K_P + K_I\frac{1}{s}$---$\frac{K}{s+a}$---$Y(s)$