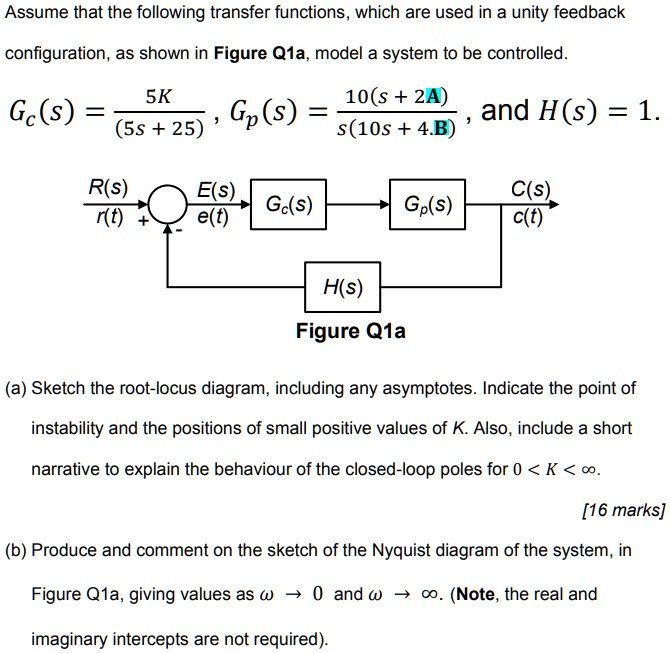
Assume that the following transfer functions, which are used in a unity feedback\nconfiguration, as shown in Figure Q1a, model a system to be controlled.\n\n$G_c(s) = \frac{5K}{(5s + 25)}$, $G_p(s) = \frac{10(s + 2A)}{s(10s + 4.B)}$, and $H(s) = 1$.\n\n(a) Sketch the root-locus diagram, including any asymptotes. Indicate the point of\ninstability and the positions of small positive values of K. Also, include a short\nnarrative to explain the behaviour of the closed-loop poles for $0 < K < \infty$.\n\n[16 marks]\n\n(b) Produce and comment on the sketch of the Nyquist diagram of the system, in\nFigure Q1a, giving values as $\omega \to 0$ and $\omega \to \infty$. (Note, the real and\nimaginary intercepts are not required).