Questions asked
A group of blocks is being accelerated upward at 6 m/s². What is the tension, T3, in the cable between the 6kg block and the 5 kg block? Ignore the mass of the cables. MOTOR a = 6 m/s² 8 kg 3 kg 5 kg T₃ =? 6 kg g 4 kg 5 kg --- OCR End ---
What organism did land plants evolve from? What are the five key traits of plants that separate them from algal ancestors?
The given problem regarding direction of Poynting vector between plates of discharging capacitor in DC RC circuit falls under specifically within subtopic of electricity and magnetism and it relates to concepts of electromagnetic fields and circuits regarding behavior of capacitors and poynting vector, which characterizes flow of electromagnetic energy. Determine:
A computer A takes 5 seconds to execute program X and another computer B takes 20 seconds to take to execute the same program X. Which computer is faster to execute the program X and how many times as fast is it? Please justify your answer.
Which of the following is not a polysaccharide? Group of answer choices Glycogen Lactose Cellulose Amylose starch Amylopectin starch
Evaluate the indefinite integral. (Use C for the constant of integration.) \int e^{4x} \sin(e^{4x}) dx
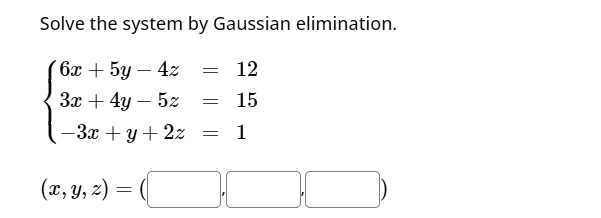
Solve the system by Gaussian elimination.\\ $\begin{cases} 6x + 5y - 4z = 12\\ 3x + 4y - 5z = 15\\ -3x + y + 2z = 1 \end{cases}$\\ $(x, y, z) = (\Box, \Box, \Box)$
8x=5 so x=log8(5) ln(x)=8 so x=e^8 x=8cos can be re-written as cos(x)=8 cos(5x)=5cos(x)
All of the following are sunk cost investments that precommit an incumbent to aggressively defend market share and the cash flow prior to threatened entry except: a. retail displays which hold only L'eggs egg-shaped hosiery packages b. neon signage for an independently owned Krispy Kreme store c. reputational investments in company logos (e.g., Beatrice) d. automobile showrooms e. excess capacity in a declining industry
Consider the following state space representation: $\dot{x} = \begin{bmatrix} 0 & 1 \\ 0 & 0 \end{bmatrix} x + \begin{bmatrix} 0 \\ 1 \end{bmatrix} u$ y = \begin{bmatrix} 1 & 0.5 \end{bmatrix} x For the above system calculate the full-order observer L that estimates the states of the system. Consider the poles of the dynamics of the estimation error are located at {-1, -1}