TABLE I
CONTROLLED SYSTEM PARAMETERS
Parameter
Value
Input voltage E
12 V
Inductance L
4mH
Output Capacitor $C_o$
220µF
Output load resistor $R_L$
20Ω
PWM Switching
25kHz
frequency
Sampling period T
0.9ms
Considering the prediction horizon N=4 the following matrices
(given by (17a-b)) are then obtained
$$
F = \begin{bmatrix}
-3.2984 \times 10^{25} & -1.6633 \times 10^{25} \\
-1.1313 \times 10^{22} & -3.0343 \times 10^{21} \\
3.1289 \times 10^{19} & 1.5244 \times 10^{19} \\
3.6979 \times 10^{15} & -3.7859 \times 10^{14}
\end{bmatrix}
$$
(27a)
$$
H = \begin{bmatrix}
2.1939 \times 10^{26} & 4.32 \times 10^{27} & -2.0170 \times 10^{26} & 2.3244 \times 10^{21} \\
4.32 \times 10^{27} & 4.226 \times 10^{27} & -4.226 \times 10^{16} & -1.022 \times 10^{13} \\
-2.0170 \times 10^{26} & -4.226 \times 10^{16} & 1.859 \times 10^{4} & 0 \\
2.3244 \times 10^{21} & -1.022 \times 10^{13} & 0 & 9 \times 10^{6}
\end{bmatrix}
$$
(27b)
The optimization is performed using Matlab's quadprog
function
$$
V_{Predicted}(k) = quadprog(H, F \times x, A, b_0)
$$
(28)
Where x is the state vector, Ac and b0 are constant matrices
determined offline
$$
A_c = \begin{bmatrix}
1/4 & 1 \\
-1/4 & -1
\end{bmatrix}
et \quad b_0 = \begin{bmatrix}
1 \\
1
\end{bmatrix}
$$
$$
\begin{bmatrix}
1 & 1 & 1 & 1
\end{bmatrix}
\frac{1}{f^*} (1 - \alpha_{k})
$$
(29)
It allowed us to calculate the optimal gain online at each
sampling period. As mentioned in (23), we are concerned by
the first element of the optimal prediction $u(k)$.
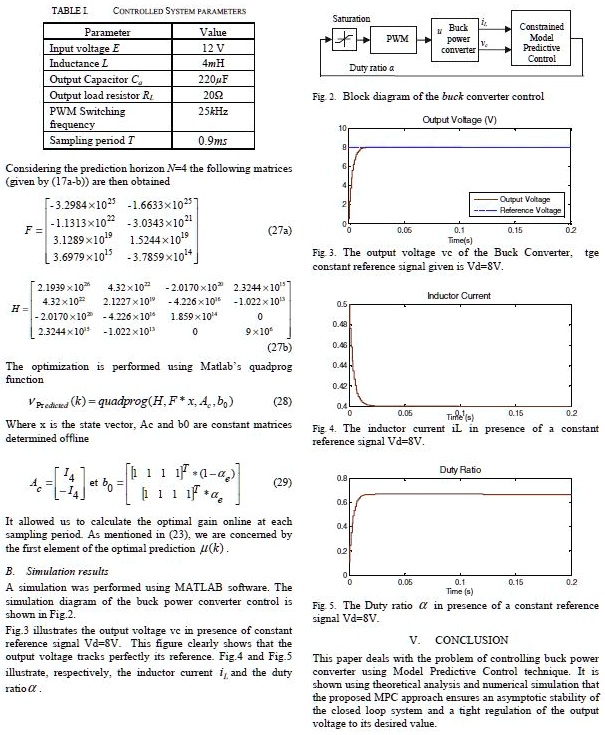
B. Simulation results
A simulation was performed using MATLAB software. The
simulation diagram of the buck power converter control is
shown in Fig.2.
Fig.3 illustrates the output voltage $v_c$ in presence of constant
reference signal $V_d$=8V. This figure clearly shows that the
output voltage tracks perfectly its reference. Fig.4 and Fig.5
illustrate, respectively, the inductor current $i_L$ and the duty
ratio $\alpha$.
This paper deals with the problem of controlling buck power
converter using Model Predictive Control technique. It is
shown using theoretical analysis and numerical simulation that
the proposed MPC approach ensures an asymptotic stability of
the closed loop system and a tight regulation of the output
voltage to its desired value.