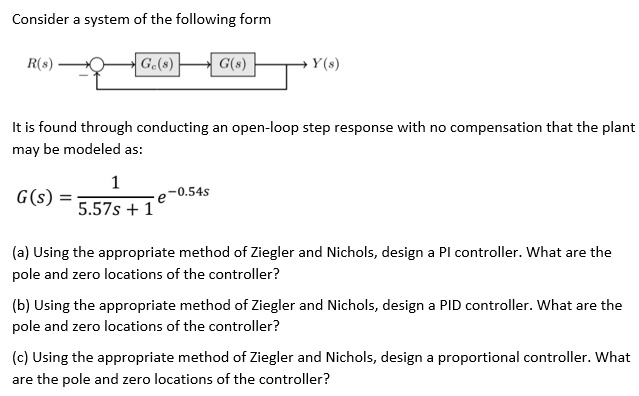
Consider a system of the following form
R(s) \(\circlearrowleft\) \(G_c(s)\) \(\rightarrow\) \(G(s)\) \(\rightarrow\) Y(s)
It is found through conducting an open-loop step response with no compensation that the plant
may be modeled as:
\(G(s) = \frac{1}{5.57s + 1}e^{-0.54s}
(a) Using the appropriate method of Ziegler and Nichols, design a PI controller. What are the
pole and zero locations of the controller?
(b) Using the appropriate method of Ziegler and Nichols, design a PID controller. What are the
pole and zero locations of the controller?
(c) Using the appropriate method of Ziegler and Nichols, design a proportional controller. What
are the pole and zero locations of the controller?