design variables
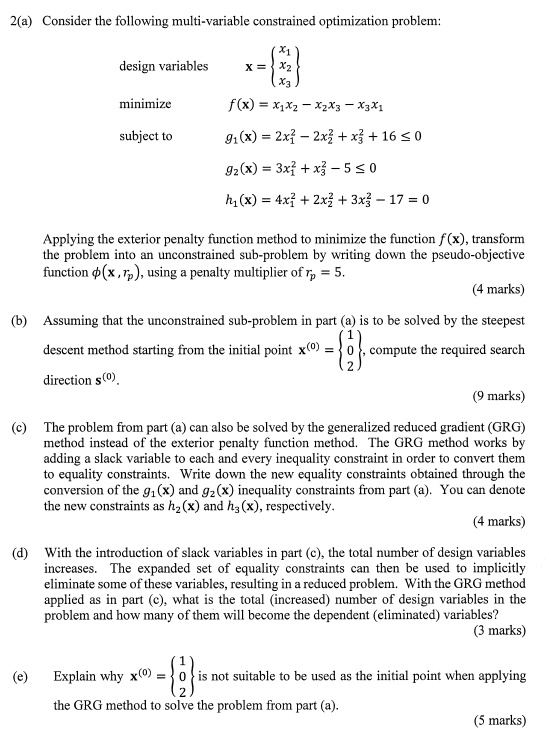
2(a) Consider the following multi-variable constrained optimization problem:
$X = \begin{bmatrix} x_1\\x_2\\x_3 \end{bmatrix}$
minimize
$f(x) = x_1x_2 - x_2x_3 - x_3x_1$
subject to
$g_1(x) = 2x_1^2 - 2x_2^2 + x_3^2 + 16 \le 0$
$g_2(x) = 3x_1^2 + x_3^2 - 5 \le 0$
$h_1(x) = 4x_1^2 + 2x_2^2 + 3x_3^2 - 17 = 0$
Applying the exterior penalty function method to minimize the function $f(x)$, transform
the problem into an unconstrained sub-problem by writing down the pseudo-objective
function $\phi(x, r_p)$, using a penalty multiplier of $r_p = 5$.
(4 marks)
(b) Assuming that the unconstrained sub-problem in part (a) is to be solved by the steepest
descent method starting from the initial point $x^{(0)} = \begin{bmatrix} 1\\0\\2 \end{bmatrix}$, compute the required search
direction $s^{(0)}$.
(9 marks)
(c) The problem from part (a) can also be solved by the generalized reduced gradient (GRG)
method instead of the exterior penalty function method. The GRG method works by
adding a slack variable to each and every inequality constraint in order to convert them
to equality constraints. Write down the new equality constraints obtained through the
conversion of the $g_1(x)$ and $g_2(x)$ inequality constraints from part (a). You can denote
the new constraints as $h_2(x)$ and $h_3(x)$, respectively.
(4 marks)
(d) With the introduction of slack variables in part (c), the total number of design variables
increases. The expanded set of equality constraints can then be used to implicitly
eliminate some of these variables, resulting in a reduced problem. With the GRG method
applied as in part (c), what is the total (increased) number of design variables in the
problem and how many of them will become the dependent (eliminated) variables?
(3 marks)
(e) Explain why $x^{(0)} = \begin{bmatrix} 1\\0\\2 \end{bmatrix}$ is not suitable to be used as the initial point when applying
the GRG method to solve the problem from part (a).
(5 marks)