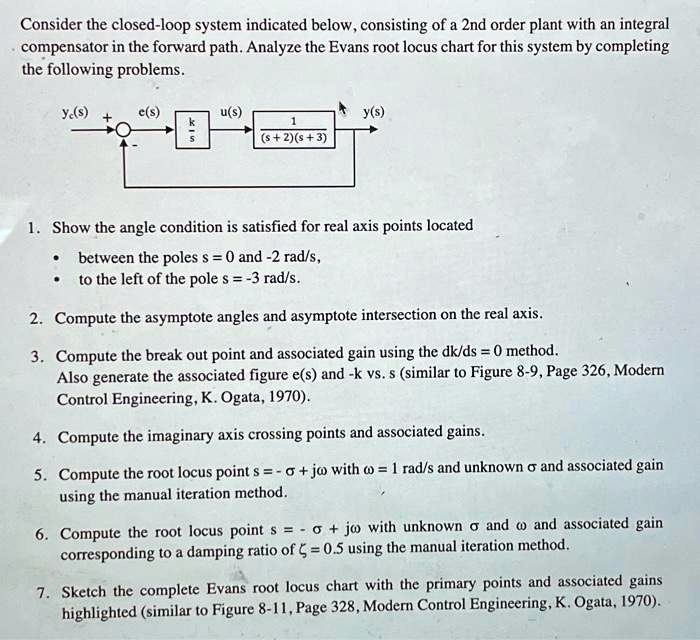
Consider the closed-loop system indicated below, consisting of a 2nd order plant with an integral compensator in the forward path. Analyze the Evans root locus chart for this system by completing the following problems.
y(s) + e(s) k u(s) y(s) 1 (s+2)(s+3) 1. Show the angle condition is satisfied for real axis points located \begin{itemize} \item between the poles $s = 0$ and $-2$ rad/s, \item to the left of the pole $s = -3$ rad/s. \end{itemize} 2. Compute the asymptote angles and asymptote intersection on the real axis. 3. Compute the break out point and associated gain using the $dk/ds = 0$ method. Also generate the associated figure $e(s)$ and $-k$ vs. $s$ (similar to Figure 8-9, Page 326, Modern Control Engineering, K. Ogata, 1970). 4. Compute the imaginary axis crossing points and associated gains. 5. Compute the root locus point $s = -\sigma + j\omega$ with $\omega = 1$ rad/s and unknown $\sigma$ and associated gain using the manual iteration method. 6. Compute the root locus point $s = -\sigma + j\omega$ with unknown $\sigma$ and $\omega$ and associated gain corresponding to a damping ratio of $\zeta = 0.5$ using the manual iteration method. 7. Sketch the complete Evans root locus chart with the primary points and associated gains highlighted (similar to Figure 8-11, Page 328, Modern Control Engineering, K. Ogata, 1970).