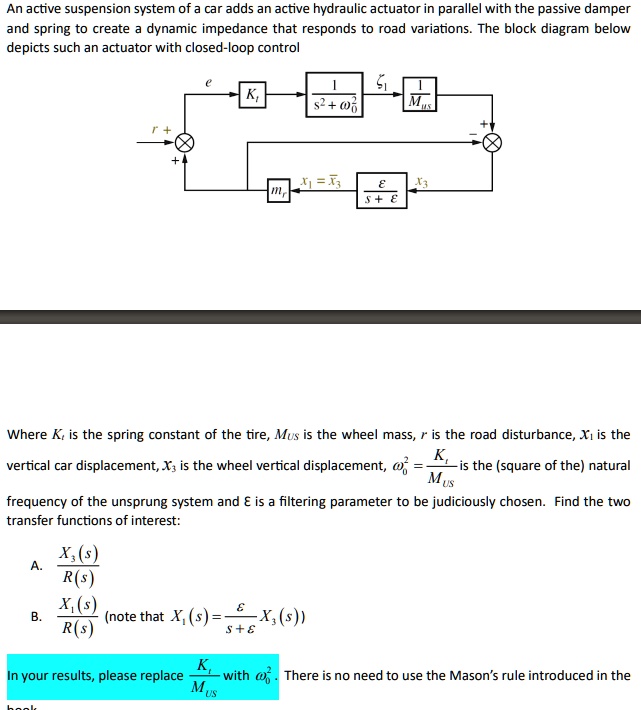
An active suspension system of a car adds an active hydraulic actuator in parallel with the passive damper and spring to create a dynamic impedance that responds to road variations. The block diagram below depicts such an actuator with closed-loop control
Where $K_t$ is the spring constant of the tire, $M_{us}$ is the wheel mass, $r$ is the road disturbance, $X_1$ is the vertical car displacement, $X_3$ is the wheel vertical displacement, $\omega_0^2 = \frac{K_t}{M_{us}}$ is the (square of the) natural frequency of the unsprung system and $\epsilon$ is a filtering parameter to be judiciously chosen. Find the two transfer functions of interest:
A. $\frac{X_3(s)}{R(s)}$
B. $\frac{X_1(s)}{R(s)}$ (note that $X_1(s) = \frac{\epsilon}{s + \epsilon}X_3(s)$)
In your results, please replace $\frac{K_t}{M_{us}}$ with $\omega_0^2$. There is no need to use the Mason's rule introduced in the book