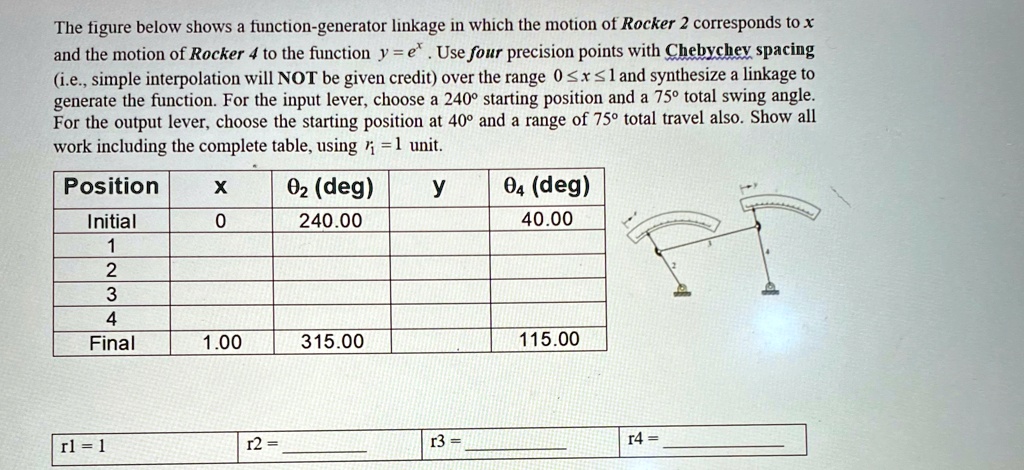
The figure below shows a function-generator linkage in which the motion of Rocker 2 corresponds to x and the motion of Rocker 4 to the function $y = e^x$. Use four precision points with Chebychev spacing (i.e., simple interpolation will NOT be given credit) over the range $0 \leq x \leq 1$ and synthesize a linkage to generate the function. For the input lever, choose a 240° starting position and a 75° total swing angle. For the output lever, choose the starting position at 40° and a range of 75° total travel also. Show all work including the complete table, using $r_1 = 1$ unit.
Position
X
$\theta_2$ (deg)
y
$\theta_4$ (deg)
Initial
0
240.00
40.00
1
2
3
4
Final
1.00
315.00
115.00
$r_1 = 1$
$r_2 =$
$r_3 =$
$r_4 = $