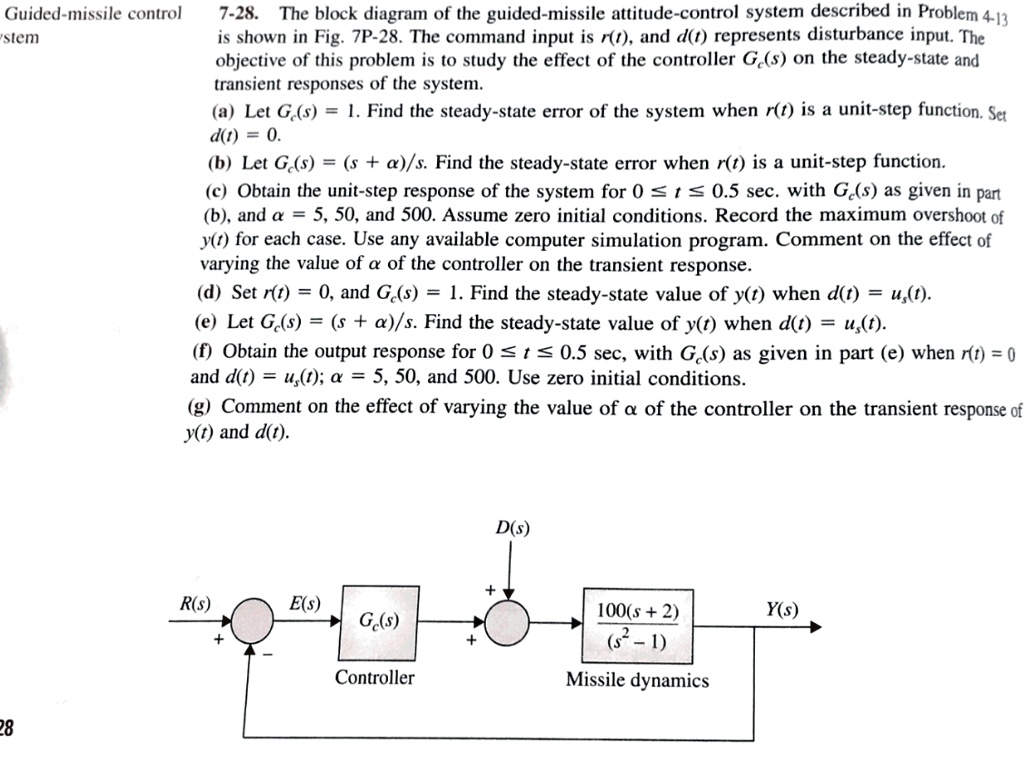
Objective of this problem is to study the effect of the controller G(s) on the steady-state and transient responses of the system.
(a) Let G(s) = 1. Find the steady-state error of the system when r(t) is a unit-step function. Set dt=0.
(b) Let G(s) = (s + k)/s. Find the steady-state error when r(t) is a unit-step function.
(c) Obtain the unit-step response of the system for 0 ≤ t ≤ 0.5 sec. with G(s) as given in part (b), and a = 5, 50, and 500. Assume zero initial conditions. Record the maximum overshoot of y(t) for each case. Use any available computer simulation program. Comment on the effect of varying the value of a of the controller on the transient response.
(d) Set r(t) = 0, and G(s) = 1. Find the steady-state value of y(t) when d(t) = u(t).
(e) Let G(s) = (s + k)/s. Find the steady-state value of y(t) when d(t) = u(t).
(f) Obtain the output response for 0 ≤ t ≤ 0.5 sec, with G(s) as given in part (e) when r(t) = 0 and d(t) = u(t); a = 5, 50, and 500. Use zero initial conditions.
(g) Comment on the effect of varying the value of k of the controller on the transient response of y(t) and d(t).
D(s)
R(s)
E(s)
100(s + 2) / (s^2-1)
Y(s)
Gc(s)
Controller
Missile dynamics
28