Step by step solution with explanation pls
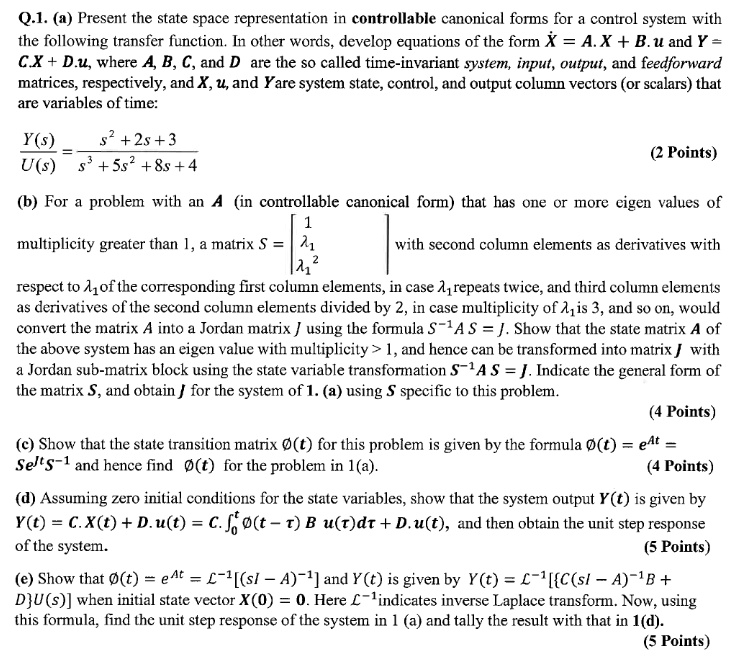
Q.1. a Present the state space representation in controllable canonical forms for a control system with the following transfer function. In other words, develop equations of the form X = A.X + B.u and Y = C.X + D.u, where A, B, C, and D are the so called time-invariant system, input, output, and feedforward matrices, respectively, and X, u, and Yare system state, control, and output column vectors (or scalars) that are variables of time:
Y(s)s2+2s+3 U(s)s3+5s+8s+4
(2 Points)
(b) For a problem with an A (in controllable canonical form) that has one or more eigen values of 1 multiplicity greater than 1, a matrix S = with second column elements as derivatives with
respect to Mof the corresponding first column elements,in case ,repeats twice,and third column elements as derivatives of the second column elements divided by 2, in case multiplicity of ,is 3, and so on, would convert the matrix A into a Jordan matrix / using the formula S-1A S = J. Show that the state matrix A of the above system has an eigen value with multiplicity > 1, and hence can be transformed into matrix J with a Jordan sub-matrix block using the state variable transformation S-1A S = J. Indicate the general form of the matrix S, and obtain / for the system of 1. (a) using S specific to this problem. (4 Points)
(c) Show that the state transition matrix (t) for this problem is given by the formula (t) = eAt = Ses-1 and hence findt for the problem in 1a 4 Points
d) Assuming zero initial conditions for the state variables, show that the system output Y(t) is given by Y(t) = C. X(t) + D. u(t) = C. f (t - t) B u(t)d + D. u(t), and then obtain the unit step response of the system. (5 Points)
e)Show that (t)=eAt=-1[(sI -A)-1] and Y(t) is given by Yt)=-1[{Csl -A)-1B + D}U(s)] when initial state vector X(0) = 0. Here -1indicates inverse Laplace transform. Now, using this formula, find the unit step response of the system in 1 (a) and tally the result with that in 1(d). (5 Points)