Example
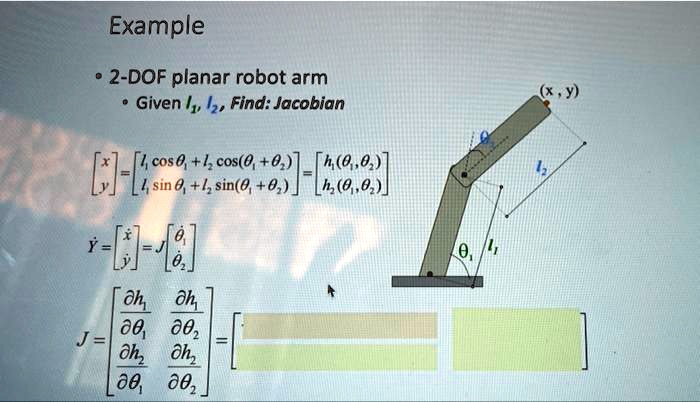
• 2-DOF planar robot arm
• Given $l_1, l_2$, Find: Jacobian
$\begin{bmatrix} x \ y \end{bmatrix} = \begin{bmatrix} l_1 \cos\theta_1 + l_2 \cos(\theta_1 + \theta_2) \ l_1 \sin\theta_1 + l_2 \sin(\theta_1 + \theta_2) \end{bmatrix} = \begin{bmatrix} h_1(\theta_1, \theta_2) \ h_2(\theta_1, \theta_2) \end{bmatrix}$
$\dot{y} = \begin{bmatrix} \dot{x} \ \dot{y} \end{bmatrix} = J \begin{bmatrix} \dot{\theta_1} \ \dot{\theta_2} \end{bmatrix}$
$J = \begin{bmatrix} \frac{\partial h_1}{\partial \theta_1} & \frac{\partial h_1}{\partial \theta_2} \\ \frac{\partial h_2}{\partial \theta_1} & \frac{\partial h_2}{\partial \theta_2} \end{bmatrix} = $