Your work is to design a motor-actuated recumbent elliptical trainer for the training and
rehabilitation of individuals with restricted mobility in their lower extremities.
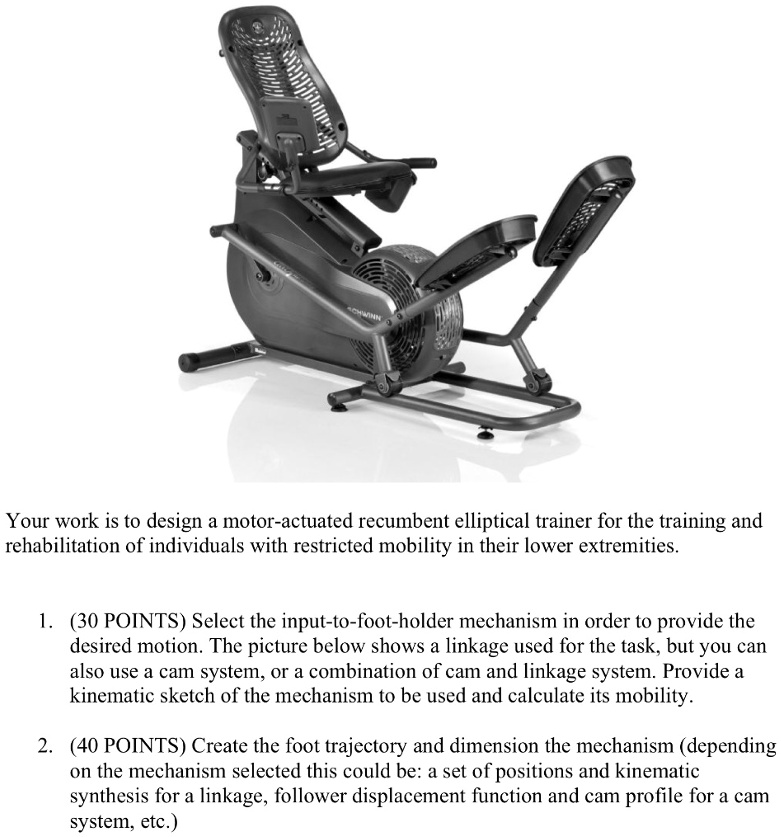
1. (30 POINTS) Select the input-to-foot-holder mechanism in order to provide the
desired motion. The picture below shows a linkage used for the task, but you can
also use a cam system, or a combination of cam and linkage system. Provide a
kinematic sketch of the mechanism to be used and calculate its mobility.
2. (40 POINTS) Create the foot trajectory and dimension the mechanism (depending
on the mechanism selected this could be: a set of positions and kinematic
synthesis for a linkage, follower displacement function and cam profile for a cam
system, etc.)