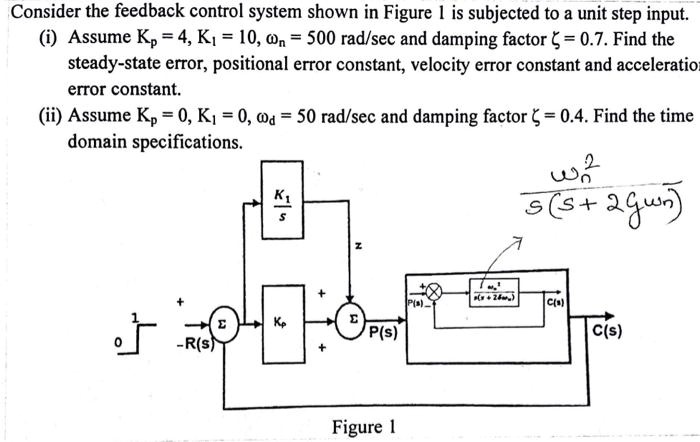
Consider the feedback control system shown in Figure 1 is subjected to a unit step input.
(i) Assume $K_p = 4$, $K_i = 10$, $\omega_n = 500$ rad/sec and damping factor $\zeta = 0.7$. Find the
steady-state error, positional error constant, velocity error constant and acceleration
error constant.
(ii) Assume $K_p = 0$, $K_i = 0$, $\omega_d = 50$ rad/sec and damping factor $\zeta = 0.4$. Find the time
domain specifications.
$\frac{\omega_n^2}{s(s + 2\zeta\omega_n)}$