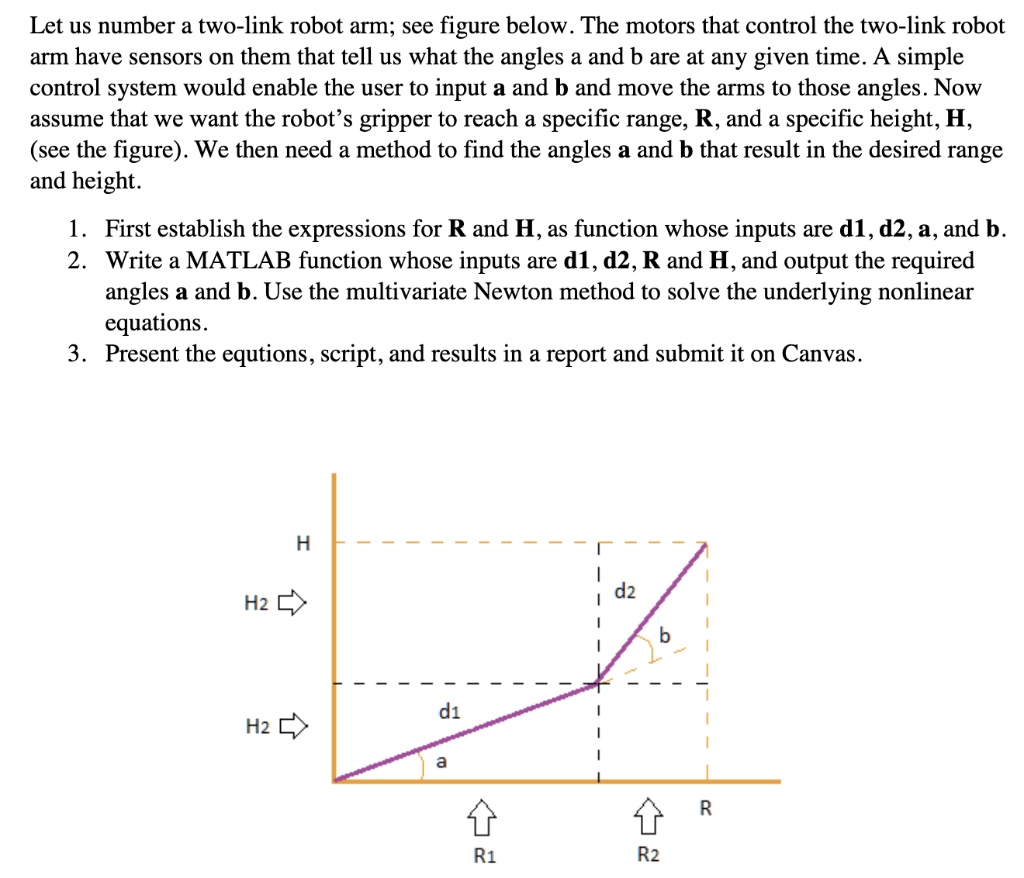
Let us number a two-link robot arm; see figure below. The motors that control the two-link robot
arm have sensors on them that tell us what the angles a and b are at any given time. A simple
control system would enable the user to input a and b and move the arms to those angles. Now
assume that we want the robot's gripper to reach a specific range, R, and a specific height, H,
(see the figure). We then need a method to find the angles a and b that result in the desired range
and height.
1. First establish the expressions for R and H, as function whose inputs are d1, d2, a, and b.
2. Write a MATLAB function whose inputs are d1, d2, R and H, and output the required
angles a and b. Use the multivariate Newton method to solve the underlying nonlinear
equations.
3. Present the equations, script, and results in a report and submit it on Canvas.