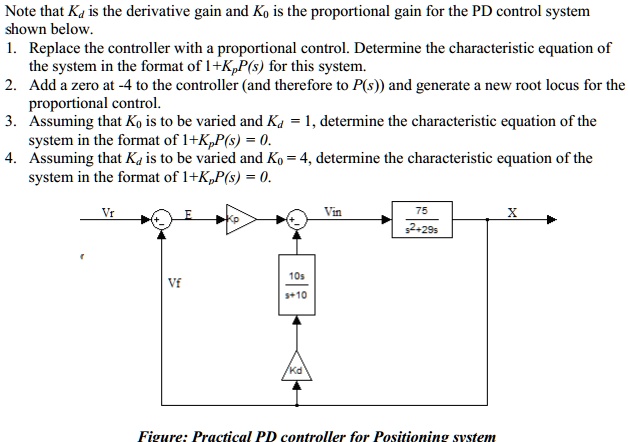
Note that $K_d$ is the derivative gain and $K_o$ is the proportional gain for the PD control system shown below.
1. Replace the controller with a proportional control. Determine the characteristic equation of the system in the format of $1+K_pP(s)$ for this system.
2. Add a zero at -4 to the controller (and therefore to $P(s)$) and generate a new root locus for the proportional control.
3. Assuming that $K_o$ is to be varied and $K_d = 1$, determine the characteristic equation of the system in the format of $1+K_pP(s) = 0$.
4. Assuming that $K_d$ is to be varied and $K_o = 4$, determine the characteristic equation of the system in the format of $1+K_pP(s) = 0$.
Vr
E
(+
Kp
10s
Vf
s+10
Kd
Vin
75
X
$s^2+29s$
Figure: Practical PD controller for Positioning system